
Consideremos la posibilidad de crear un vehículo de orugas con un diseño bastante básico que se pueda montar literalmente en un par de noches. Toda la estructura se puede dividir aproximadamente en dos partes: el chasis con orugas y la parte eléctrica, que proporcionará control remoto de la máquina desde el control remoto.
Fabricación de chasis
No se necesitarán muchos materiales: las orugas serán accionadas por un par de motorreductores, la base de toda la estructura será un pequeño trozo de madera contrachapada gruesa y también necesitarás varias ruedas de plástico sobre las que girarán las orugas. Para la máquina se pueden utilizar motorreductores de casi cualquier tamaño adecuado, los "amarillos" son ideales, que se pueden encontrar en muchas tiendas de repuestos para radio, o se pueden comprar en Ali, la caja de cambios que contienen proporciona una relación de transmisión de 1: 48, que para este caso es el valor más óptimo.

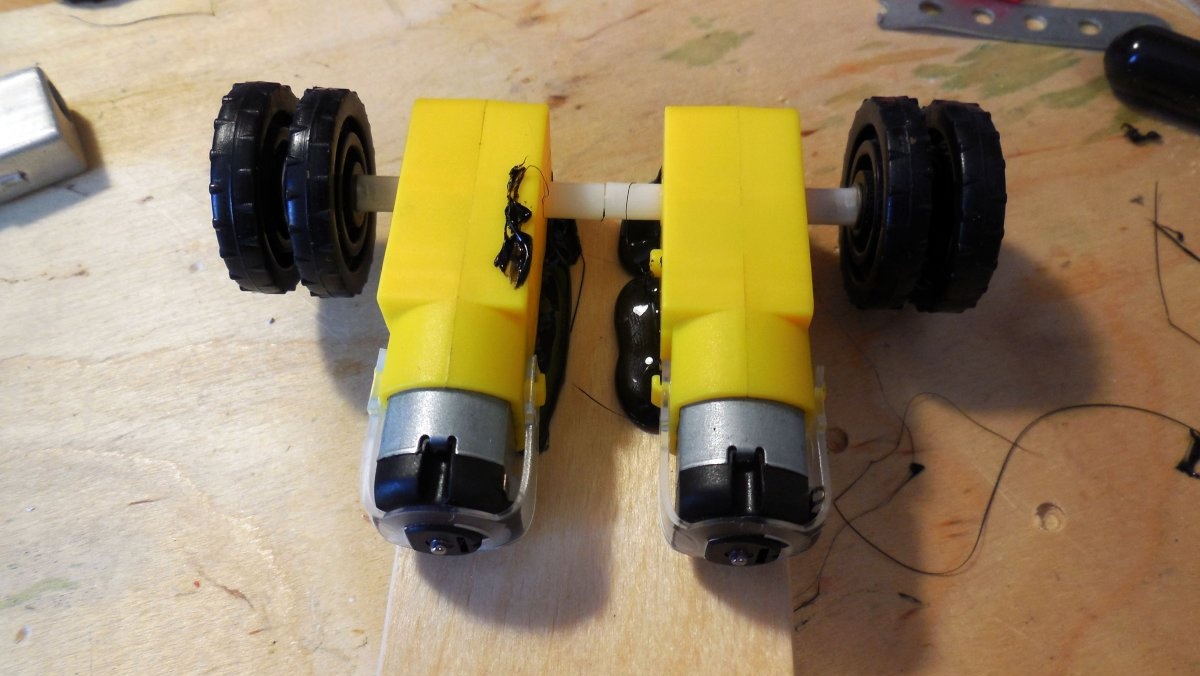
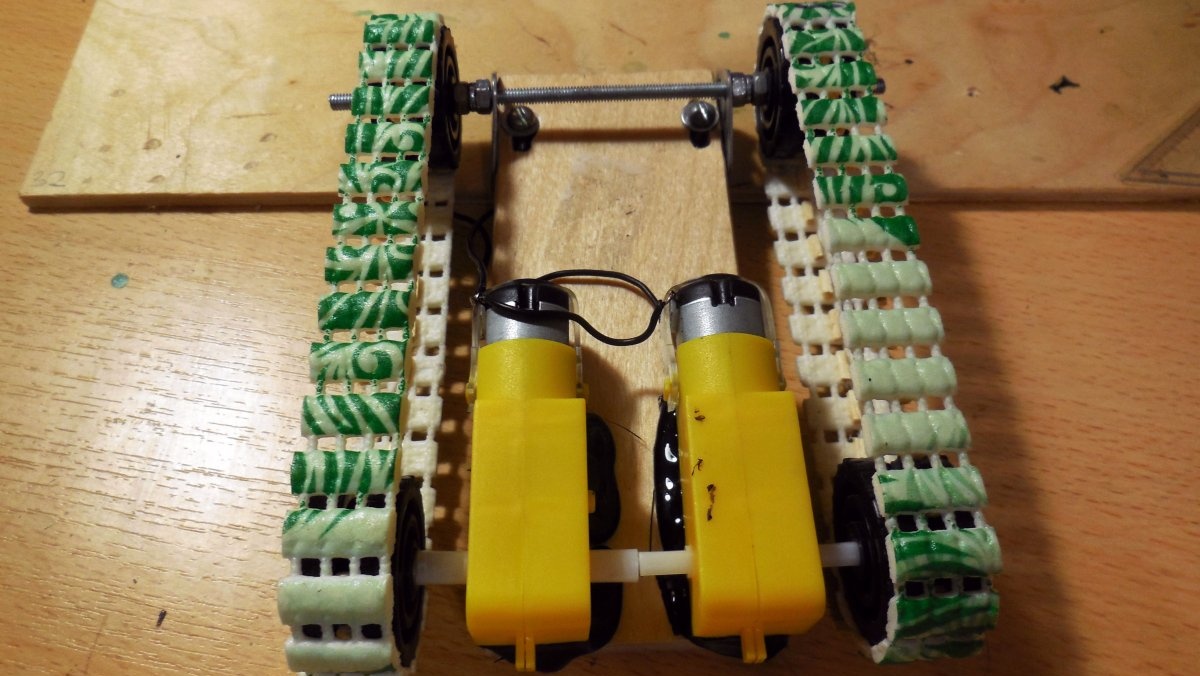
Cada caja de cambios tiene salida a dos ejes, en lados opuestos de la carrocería; para el chasis con orugas, solo se usará un eje de cada motor, el segundo se puede quitar por completo o dejar en caso de que estos motores aún se necesiten en otros proyectos.Es necesario sujetar las ruedas a los ejes; la forma más sencilla de hacerlo es atornillar un tornillo autorroscante en el propio eje (es hueco por dentro), para que las ruedas se sujeten bien. Para una fijación adicional y para evitar que el tornillo autorroscante se desenrolle, puede lubricar generosamente la junta con pegamento. Tenga en cuenta que la rueda es doble: entre cada rueda se hace un espacio de aproximadamente 3-4 mm, en el futuro, la oruga se fijará con ella.

Los motores están montados sobre una pieza de madera contrachapada duradera; su tamaño se puede elegir arbitrariamente, dependiendo del tamaño deseado de la máquina. Estos motorreductores no ofrecen lugares convenientes para la fijación, así que los fijé con pegamento caliente; las buenas barras de pegamento proporcionan una excelente calidad de conexión, como lo demuestra la experiencia.
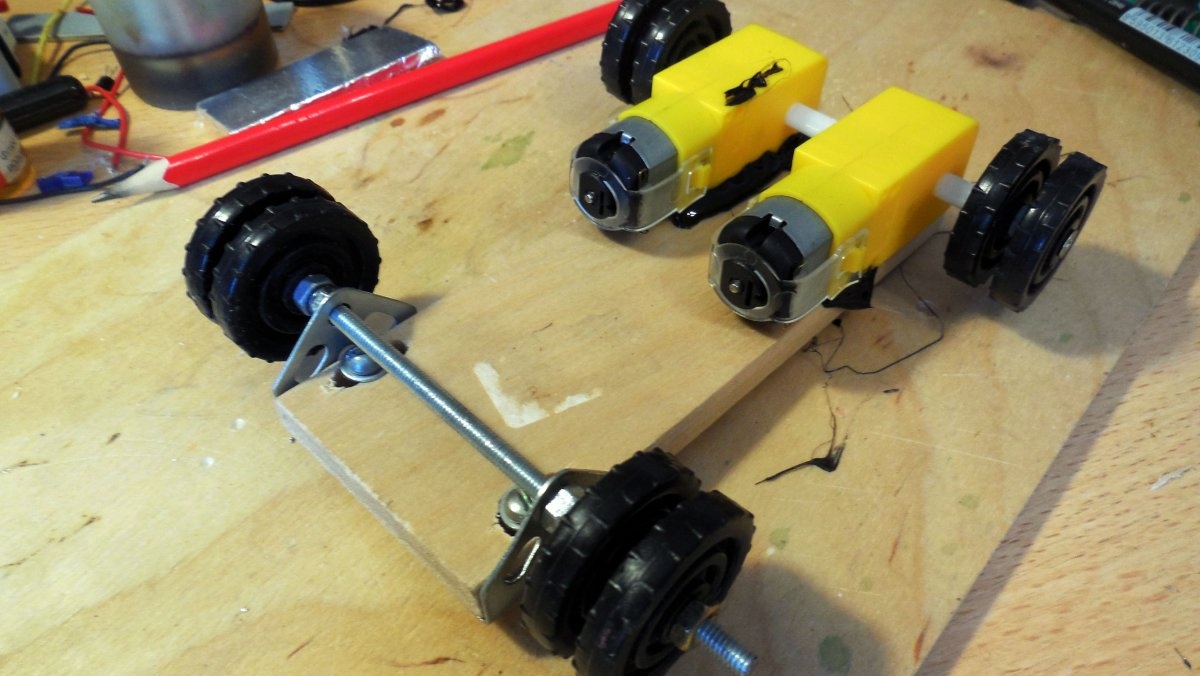
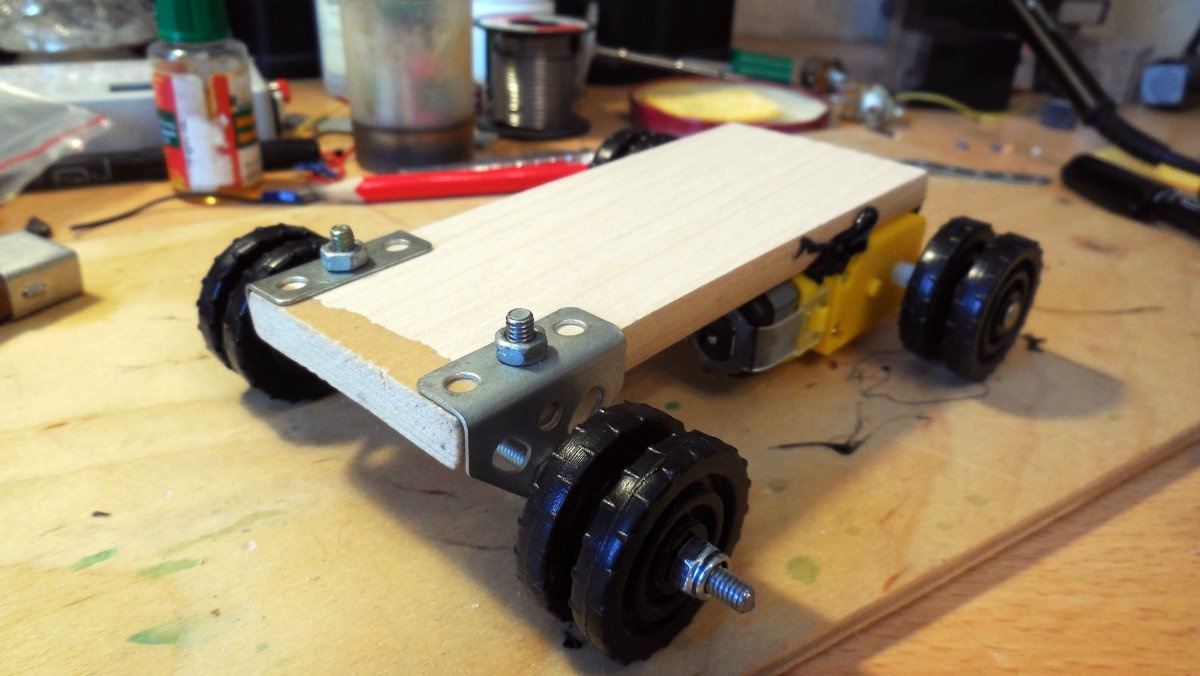
A continuación, en el lado opuesto de los motores, debe fijar las esquinas para el eje de las ruedas delanteras. Para hacer esto, recomiendo encarecidamente usar detalles de un juego de construcción de hierro para niños; allí puede encontrar esquinas ya hechas con agujeros. Al perforar un agujero en madera contrachapada, es necesario tener en cuenta que en el futuro será necesario ajustar la tensión de las orugas, por lo que es necesario perforar una serie de agujeros de aproximadamente 1-1,5 cm de largo, que luego se conectan en uno ranura oblonga. De esta manera, todo el eje delantero se moverá hacia adelante y hacia atrás, atornillado en su lugar.

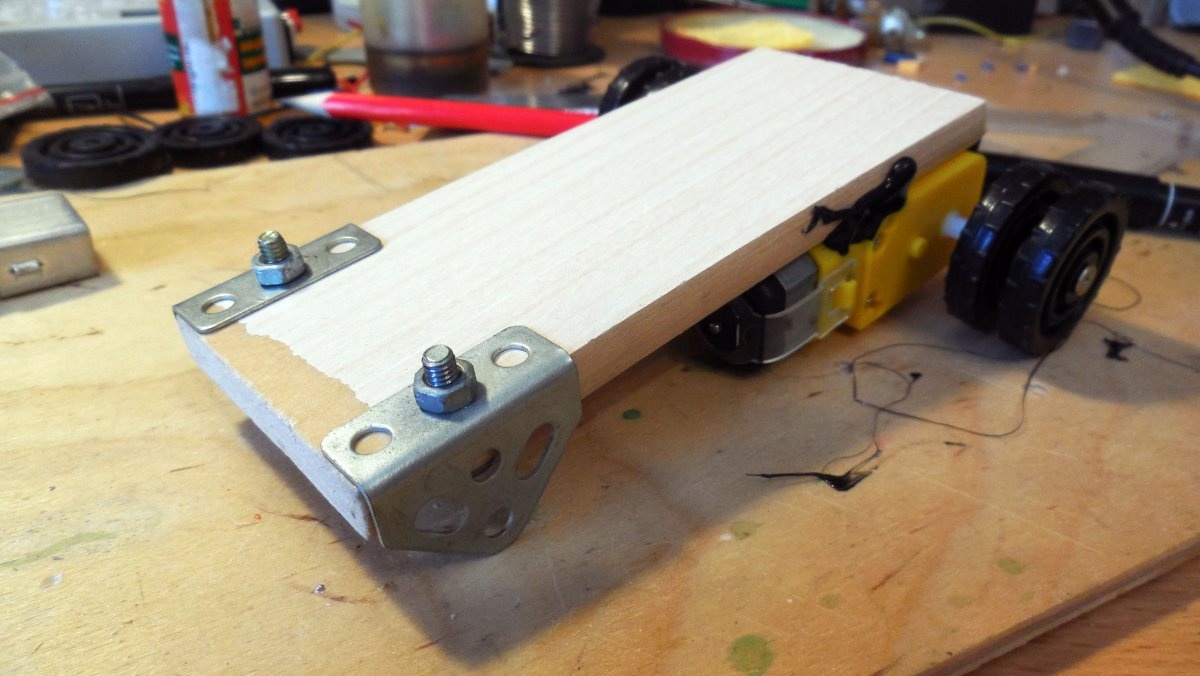
Se enrosca un pasador en los orificios de las esquinas, es conveniente utilizar M4, proporciona suficiente rigidez y al mismo tiempo encaja los orificios en las piezas del constructor de hierro. El espárrago debe quedar firmemente fijado a las esquinas, para ello es conveniente utilizar tuercas de seguridad, que no se desenroscarán por sí solas cuando la máquina comience a moverse. En los laterales se instalan las mismas ruedas dobles que en la parte trasera, con exactamente la misma holgura.Las ruedas deben girar libremente sobre el eje, esto se puede asegurar con las mismas tuercas de seguridad. Tenga en cuenta que las ruedas izquierda y derecha deben girar de forma independiente entre sí. Tomé estas ruedas del mismo juego de construcción de hierro, pero puedes cortar otras similares de plástico o cartón grueso, si las doblas en varias capas y las pegas.
hacer orugas
Es difícil imaginar, sin embargo, se pueden hacer excelentes orugas con buena tracción con una alfombra de baño de PVC, que se puede encontrar en casi cualquier ferretería. Una alfombra de este tipo consta de muchas "tiras" flexibles que están conectadas entre sí mediante hilos paralelos, que es lo que se necesita para crear una oruga. Del tapete se corta una tira de 1,5-2 cm de ancho, que debe ser igual al ancho de las ruedas utilizadas.

Luego, debe aplicar la cinta a las ruedas unidas al chasis y cortarla a la longitud requerida, luego los extremos de la cinta se pegan con superpegamento. Una vez que el pegamento se haya secado, puede probar la oruga en el chasis e incluso encender el motor; la oruga girará, pero se caerá rápidamente de las ruedas.


Para que la oruga no se caiga de las ruedas, incluso cuando el futuro vehículo pase por encima de obstáculos, es necesario hacer topes convexos en el centro de la oruga. Al girar, caerán en el hueco entre las ruedas, evitando que la oruga se salga. Hay muchas maneras de hacer tales paradas; decidí pegar cerillas a cada "paso" de la oruga; como lo ha demostrado la experiencia, este método resultó funcionar y con suficiente tensión la oruga no se cayó en absoluto. Las cerillas se cortan en trozos de 5 a 6 mm de largo y se pegan, como se muestra en la foto de abajo; se utiliza el mismo superpegamento, que garantiza una buena resistencia de unión con el material de la estera de PVC.


Se deben realizar las mismas acciones con la segunda oruga.Después de pegar las cerillas, las orugas se pueden considerar listas: ahora dependen del chasis y ya pueden comprobar cómo se conducirá el futuro automóvil aplicando voltaje de la batería directamente a ambos motores. Si es necesario, debe ajustar la fuerza de tensión: una oruga demasiado débil girará o se caerá, y una oruga demasiado apretada girará con fuerza, lo que ejercerá una tensión adicional sobre el motor.

parte electrica
En la parte eléctrica, necesitarás varias placas a la vez: placas receptoras y transmisoras para transmitir comandos desde el control remoto, convertidores elevadores para alimentar los motores, así como placas “puente” para permitir que cada motor gire en ambas direcciones. El esquema general es el siguiente: la placa del transmisor se instalará en el control remoto y la placa del receptor en el chasis de la máquina. Los convertidores elevadores convierten el voltaje de las baterías (3,7 - 4,2 voltios) a un nivel de 7-8 voltios, desde el cual se alimentarán los motores. Si los motores desarrollan suficiente velocidad directamente desde la batería, no es necesario instalar convertidores. La rotación de los motores se controlará mediante circuitos puente: circuitos especiales con transistores de efecto de campo que pueden suministrar a la salida un voltaje de una polaridad u otra, dependiendo de qué entrada (en 1 o en 2) provenga la señal de control. la placa receptora recibirá. Primero, veamos los circuitos transmisor y receptor, se presentan a continuación respectivamente.

Para ser precisos, estos circuitos se denominan codificador y decodificador, y el receptor y el transmisor son módulos RX-TX confeccionados a una frecuencia de 433 MHz, que se pueden comprar fácilmente en Ali o en muchas tiendas de repuestos para radio. Cada uno de los módulos tiene tres contactos para la conexión: alimentación más, menos, así como un contacto de DATOS para enviar o recibir datos.Los circuitos simples presentados anteriormente proporcionan un protocolo de transferencia de datos que le permite procesar 5 pulsaciones de botones. Para controlar la máquina solo necesitarás 4 canales (adelante, atrás, derecha, izquierda), por lo que el quinto canal queda libre y se puede utilizar para cualquier propósito, por ejemplo, encender y apagar los faros. Los contactos TXD y RXD de los diagramas están conectados a los contactos de DATOS del transmisor y del receptor respectivamente; por lo demás, los diagramas son sencillos y apenas requieren explicación. El voltaje de alimentación de los circuitos en sí es de 3,5 a 5 voltios, sin embargo, si instala estabilizadores 78l05 (están indicados en los diagramas), puede alimentarlos con un voltaje de 7 voltios o más. Las placas de circuito impreso ofrecen ambas opciones de alimentación; solo necesita instalar puentes en los lugares correctos. Para uso en una máquina, tanto el receptor como el transmisor pueden alimentarse directamente con baterías sin estabilizadores. Cada uno de los circuitos tiene un microcontrolador; debe actualizarse con el firmware apropiado; el firmware está en el archivo junto con los archivos de la placa.
Archivo con esquemas, firmware y placas:
Hacer el control remoto
Como opción, puede utilizar un control remoto ya preparado de algún juguete radiocontrolado roto o innecesario, si hay suficiente espacio en su interior para instalar la placa codificadora. O puedes hacer tu propio control remoto, como hice yo. Como base, utilicé otra pieza de madera contrachapada, monté sobre ella un soporte para una batería 18650, una placa codificadora con un módulo receptor, así como 4 botones, disponiéndolos para una máxima facilidad de control.Tenga en cuenta que la placa del codificador ya contiene espacios de montaje para botones en la placa; su instalación no es necesaria, excepto para comprobar la funcionalidad después del montaje. Los botones de funcionamiento se retiran del tablero mediante cables, como en las fotografías a continuación.


Montaje de la electrónica en el chasis.
En el propio chasis, por tanto, además de la placa decodificadora con el módulo receptor, se instalarán dos placas “puente” y dos conversores. Lo bueno de utilizar dos convertidores, uno para cada motor, es que puedes ajustar la velocidad de cada pista por separado. Aunque los motorreductores son idénticos, todavía tienen cierta variación en los parámetros, por lo que incluso con el mismo voltaje de alimentación pueden producir velocidades ligeramente diferentes; ajustando el voltaje en la salida de los convertidores, se puede lograr la misma velocidad. Una distorsión en las velocidades, incluso pequeña, conducirá al hecho de que el automóvil no avanzará en línea recta, sino con un ligero giro. A continuación en la foto puedes ver todas las placas necesarias para la instalación en el chasis.

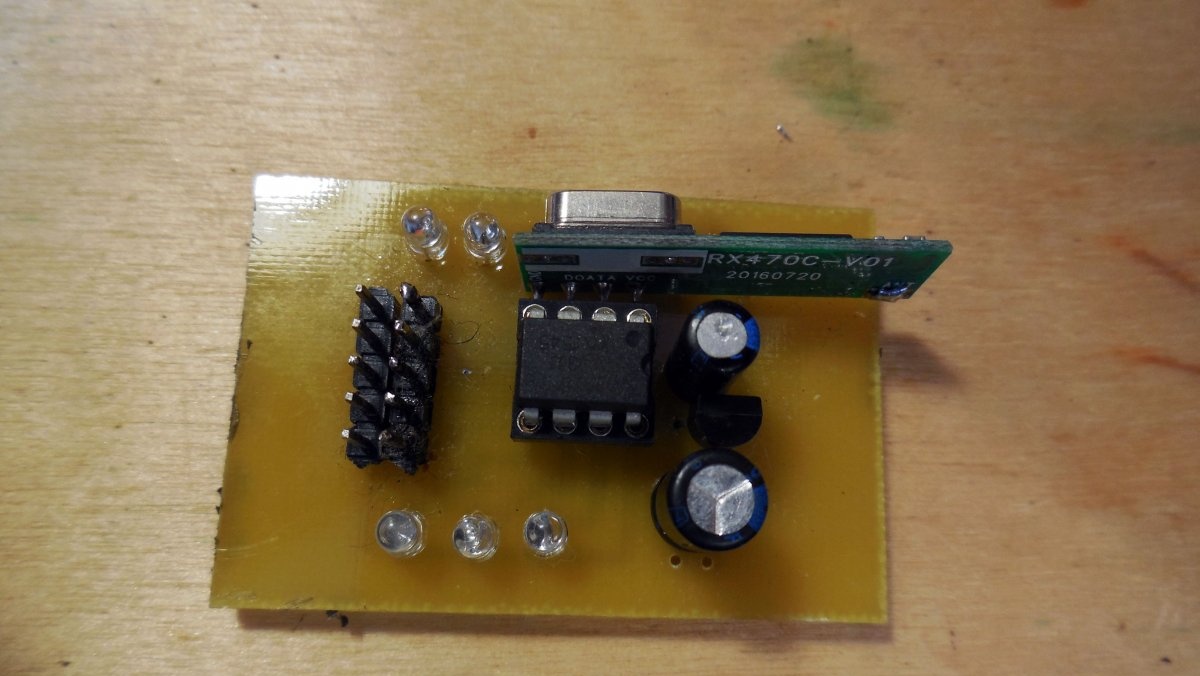
Foto detallada de la placa decodificadora. Tenga en cuenta que, al igual que la placa codificadora, tiene varios condensadores de alimentación adicionales; definitivamente no serán superfluos en dispositivos con microcontroladores.
Conjunto de circuito de puente
Parecería por qué se necesita algún tipo de circuito puente, porque basta con aplicar voltaje a los motores con una llave. Y realmente no es necesario si el coche no requiere marcha atrás, y la práctica demuestra que sin ella no es nada interesante. Por tanto, es necesario montar un pequeño circuito adicional que proporcione un cambio de polaridad al motor. La polaridad cambia, la dirección del movimiento cambia.

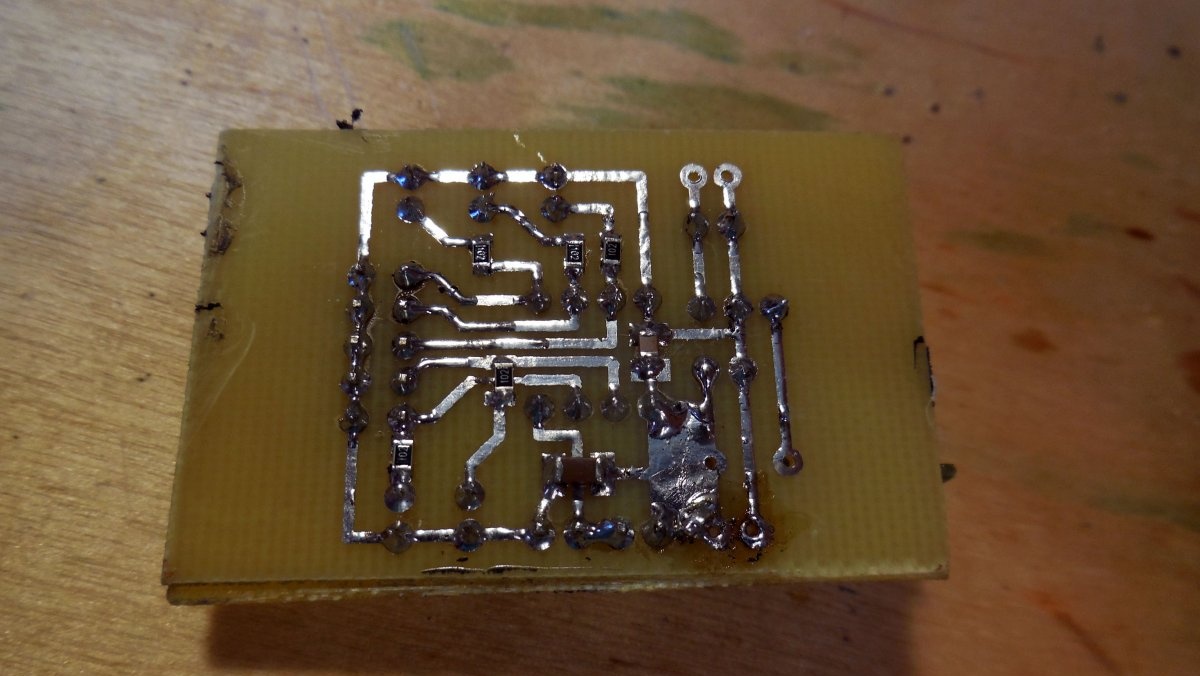
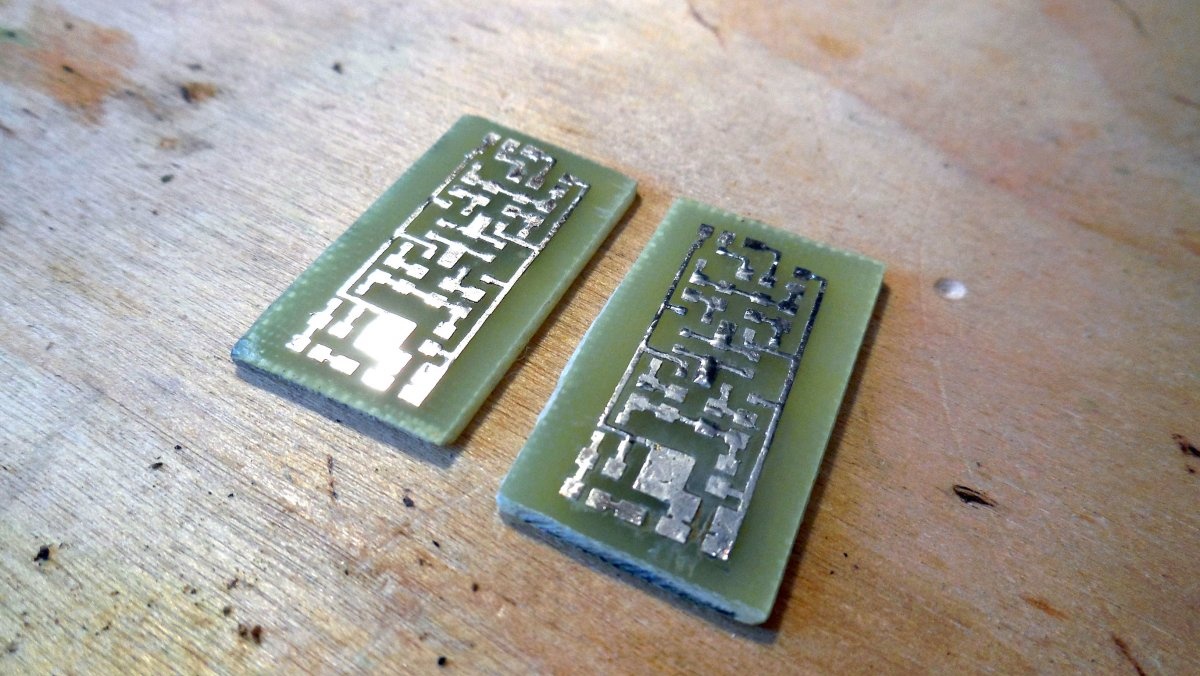
El motor está conectado a este circuito y también contiene dos entradas: in1 e in2, aplique de 3 a 5 voltios a una entrada, el motor gira en una dirección, aplique de 3 a 5 voltios a la otra, el motor gira en la otra dirección. Si no se suministra voltaje a ninguna de las entradas, o se aplica a ambas entradas a la vez, el motor no gira, esta es la lógica simple de operación. Hay 4 transistores de efecto de campo en el circuito que cambiarán el motor, por lo que deben diseñarse para una corriente suficientemente alta. Dos de ellos son de canal N, puede utilizar AO3400, los otros dos son de canal P, AO3401 es adecuado. También en el diagrama hay dos transistores NPN bipolares; el BC847 o cualquier otro similar servirá. Para no ocupar mucho espacio en el chasis, recomiendo montar este circuito utilizando componentes SMD. Diodos: los que desee, por ejemplo, 1N4148W. La entrada de energía de este circuito (designada como 12 V) recibe voltaje del convertidor. Tenga en cuenta que el circuito debe ensamblarse en dos copias: para los motores izquierdo y derecho, respectivamente, se alimentarán desde uno y desde el segundo convertidor. Las fotos de los tableros ensamblados se encuentran a continuación.

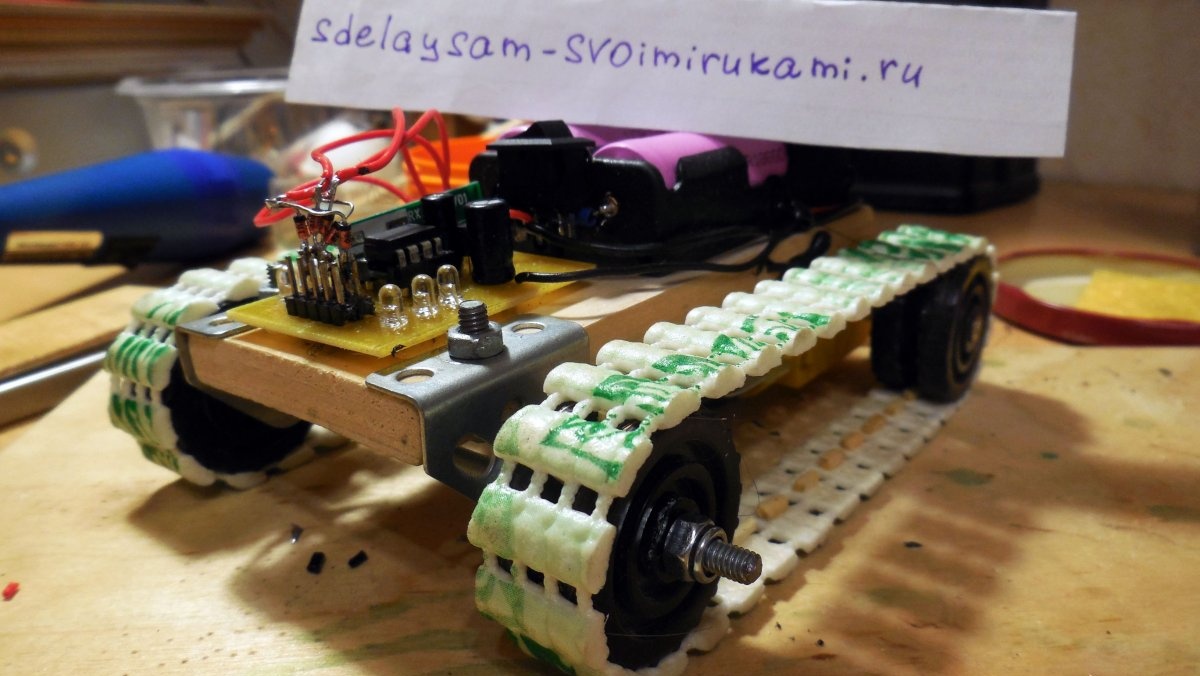
Ahora puede proceder directamente a la instalación, y el primer paso es instalar un par de soportes para baterías 18650 en la parte superior del chasis; toda la electrónica se alimentará desde ellos; las baterías están conectadas en paralelo.

Delante de las baterías, en la parte frontal, se instala una placa decodificadora que se puede conectar inmediatamente mediante un interruptor a los contactos de los soportes. Para mayor comodidad, esta placa tiene además 5 LED – al pulsar las teclas del mando a distancia se iluminarán las correspondientes LED.

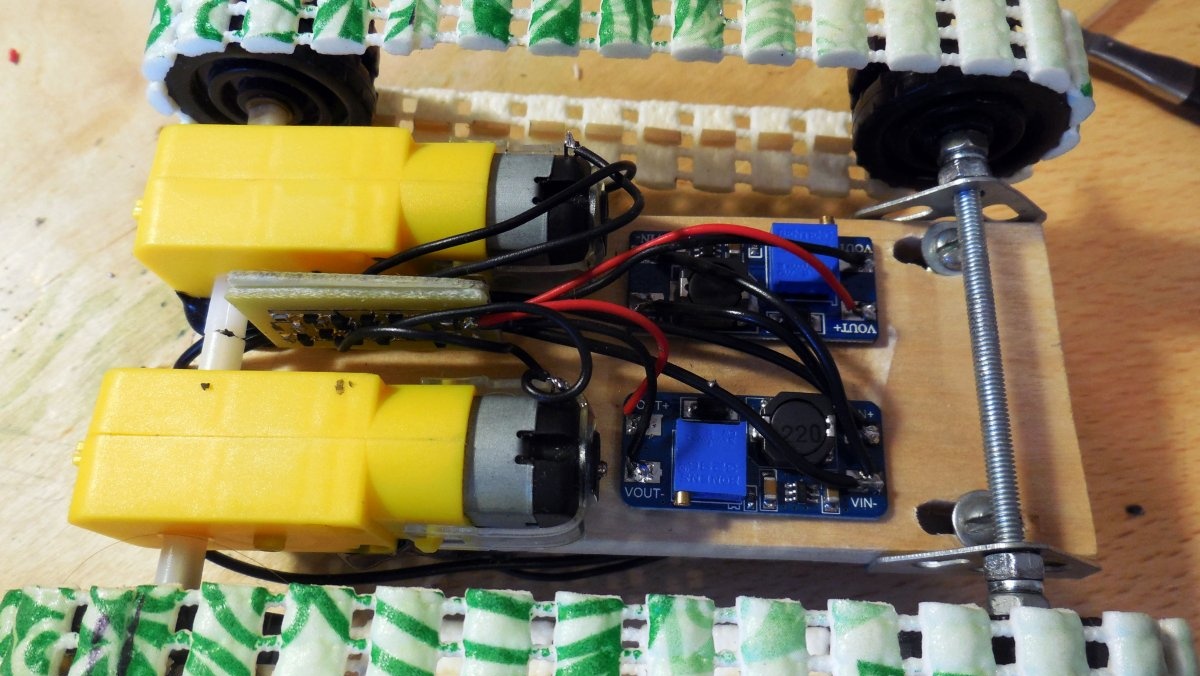
En la parte inferior, debajo del chasis, se adjuntan un par de convertidores y un par de placas puente.Todo se conecta inmediatamente mediante cables: las entradas de los convertidores a través de un interruptor a los soportes, las salidas de los convertidores para alimentar las placas de puente y las salidas de los puentes, a su vez, a los motores. Hay que tener en cuenta que los motores bajo carga pueden consumir una corriente bastante grande, por lo que en la entrada de los convertidores la corriente consumida será aproximadamente 2 veces mayor y en algunos momentos puede alcanzar 1-1,5 amperios, por lo que es necesario suministre energía con cables bastante gruesos.

Queda la última y última etapa del ensamblaje: debe conectar las salidas del decodificador (se utilizarán 4 de 5 salidas) a las entradas del puente (in1, in2), de modo que cuando presione ciertas teclas en el control remoto, la máquina reacciona de la manera deseada. A saber:
- Al presionar "adelante", ambos motores giran en la misma dirección.
- Al presionar "atrás", ambos motores giran en la dirección opuesta.
- Al presionar “derecha”: el motor izquierdo gira hacia adelante, el motor derecho gira hacia atrás, mientras que la máquina gira en el sentido de las agujas del reloj en su lugar.
- Al presionar "izquierda": el motor derecho gira hacia atrás, el motor izquierdo gira hacia adelante y la máquina gira en sentido antihorario.
- Al presionar simultáneamente "adelante" y "derecha", el motor izquierdo gira hacia adelante, el derecho se detiene, por lo que se produce un giro suave.
- Presionar simultáneamente "adelante" e "izquierda" es similar, pero en la otra dirección.
Para implementar dicha lógica, es necesario conectar las salidas del decodificador a las entradas del puente como se muestra a continuación.
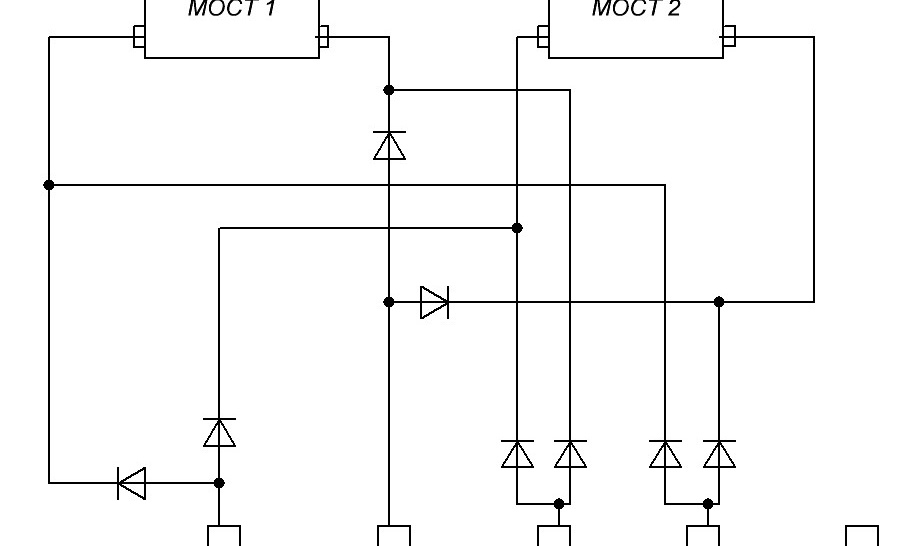
Las salidas del decodificador se muestran a continuación, una de ellas libre y puede utilizarse para otras acciones. Los diodos aquí se pueden usar como el mismo 1N4148, soldados mediante montaje en superficie directamente en las salidas del decodificador.
Pruebas
En este punto, se completa el montaje de la máquina, se pueden insertar las pilas y comprobar el funcionamiento. En este caso, no estaría de más comprobar el consumo de corriente; en ausencia de comandos del mando a distancia, debería ser pequeño, de unas pocas decenas de mA. El alcance del control remoto dependerá de los módulos receptores y transmisores utilizados; en la mayoría de los casos, proporcionan un área de recepción confiable de aproximadamente 20 a 30 metros en condiciones urbanas, que es suficiente para controlar la máquina. Las antenas ayudarán a aumentar significativamente el alcance; puede tomar trozos de cable de cobre de 17 cm de largo (para una frecuencia de 433 MHz) y soldarlos a los contactos "hormiga" de los módulos.


El resultado es un juguete muy entretenido para niños y adultos: las orugas de PVC proporcionan un excelente agarre en cualquier superficie, por lo que la máquina puede superar obstáculos fácilmente. Las ventajas de la versión con orugas también incluyen la facilidad de control: no es necesario instalar mecanismos de dirección adicionales, todo el control se produce solo cambiando la dirección de rotación de las orugas. La desventaja del diseño del chasis descrito se puede llamar la pequeña "distancia al suelo": los motores están ubicados debajo y ocupan bastante espacio allí, sin embargo, esto no interfiere con el placer de "conducir", y si Si se desea, esta desventaja se puede eliminar agregando un eje adicional para las ruedas traseras y colocando los motores en la parte superior. ¡Feliz edificio!











